PPKgo使用手順・精度検証
はじめに
近年、Phantom 4 RTK(P4R)をはじめとしたRTKモジュール搭載UAVを利用した写真測量が行われるようになってきた。こうした機体は、災害時などの緊急時や、
立ち入りが制限されている現場における測量など、少ない標定点で高い位置精度を獲得したい用途に広く利用されてきている。
また、国土交通省より公開されている『空中写真測量(無人航空機)を用いた出来形管理要領』によれば、「カメラ位置を直接計測できる手法を併用する場合は、
標定点の設置は不要」と明記されている。手法としては、
- ネットワーク型RTK、RTKおよびPPK
- UAVにプリズムを取り付けてトータルステーションで追尾
等が考えられる。
最近ではPPKが精度を向上させる手法として注目されてきている。本稿では、Hi-Target社からリリースされたPPK処理ソフトウェアPPKGoについて、その概要と 検証結果について紹介する。
PPKGoは、UAV機体上のGNSS受信機で観測したデータと、地上側基準点で観測したGNSSデータを使用して、後処理で基線解析を行うソフトウェアである。 解析結果は、テキストファイルのエクスポートもしくは画像のジオタグ属性を書き換えることにより、後工程であるSfMソフトウェアに受け渡すことが可能となっている。
処理の流れ
基本的な流れは、以下の通りである。
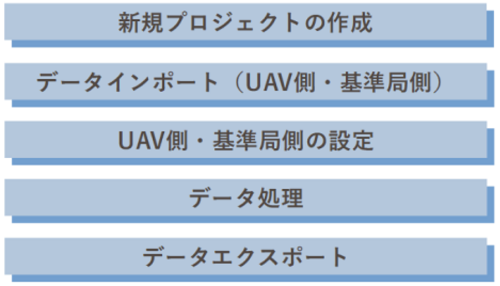
(1) データインポート
UAV側のデータは、UAVのフィールドプロジェクトから、画像・GNSS観測データ・タイムスタンプ・IMU補正データなどをインポートする。 基準局側のデータは、RinexフォーマットもしくはHi-Target社GNSS受信機の専用フォーマットがインポート可能である。 基準局のデータの入手方法として、いくつか考えられるが、それぞれ利点・欠点があり、使用状況に合わせ適宜選択することができる。
・地理院の電子基準点データ *1(2) UAVの設定 *3
現時点でサポートしている機体 (DJI P4R・M210・M200)については設定する必要はないが、それ以外のUAVの場合は、ここで機体上のGNSSアンテナ位相中心から カメラまでのオフセット量を設定する。
(3) 基準局の設定 *4
基準局を設置した場所の成果座標、使用したアンテナ、アンテナ高などを設定する。
(4) データエクスポート
解析結果はテキストファイルで出力され、SfMソフトウェアにインポートできる。また、画像データのExif属性をPPK解析後の座標値に更新して、SfMソフトウェアで 活用することも可能である。
*1 観測から2日経過している場合、地理院FTPサーバーより自動的に近傍の基準点データを検索してダウンロードする機能がある。
*2 ジェノバ、GPSデータサービス、日本テラサットでの動作を確認済み。
*3 M210およびM200の場合は、X7カメラの使用が前提。
*4 地理院FTPサーバーより自動ダウンロードした場合は、成果座標の入力は不要。
検証結果
(1) ネットワーク型RTKとの比較
P4RをVRSサービスに接続したうえで飛行させた場合、撮影画像の位置はRTK精度で取得できている。そこで、UAVが出力したタイムスタンプに記録された各画像の 位置誤差(ばらつき)を、PPK処理後の誤差と比較した。
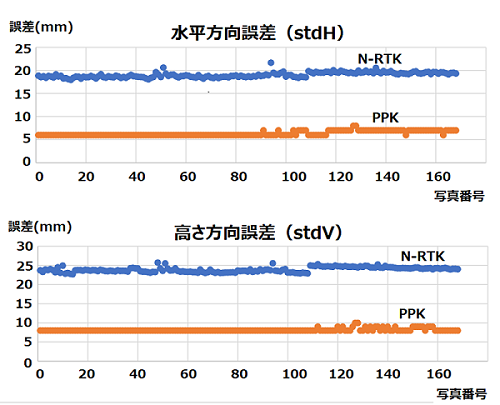
ネットワークRTKの場合ばらつきが3cm以内であるのに対し、PPKの場合は1cm以内に収まっている。
(2) 電子基準点までの距離
電子基準点を利用する場合、基準点までの距離に注意する必要がある。概ね10km以内の電子基準点を使用することが望ましい。
電子基準点【鹿野山】(基線長3km)を使用してPPK解析を行い、より遠い基準点でPPK解析した結果と比較した。

【鹿野山】でのPPK結果を基準とすると、【富津】→【市原1】と基準点が遠くなるにつれて較差が大きくなってくる。
(3) 検証点との比較
現場内に検証点を設置し、PPKの解析結果だけを用いてSfMソフトで処理をした。以下は、千葉県と青森県にて検証した結果である。
成果座標との較差(千葉) 地上画素寸法1cm、対地高度36m
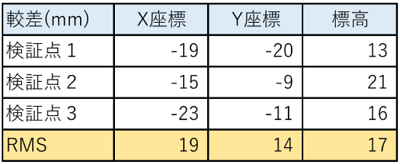
成果座標との較差(青森) 地上画素寸法3.06cm、対地高度126m
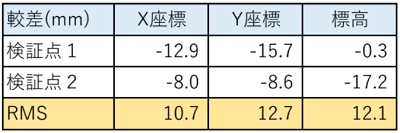
上記の通り、標定点不使用で出来形計測における精度基準(±5cm)に収まる結果を得ることができた。
PPKにより、標定点および検証点の数を削減することができ、大幅な作業工数の削減と精度の向上が期待できる。
おわりに
最後に、本ソフトウェアの検証、データ・機体の提供および評価等にご協力頂きました、関係者各位に感謝いたします。(敬称略・50音順)
株式会社イメージワン
株式会社ジーエスワークス
株式会社田上重機開発
高見土地家屋調査士事務所
高山ドローンリサーチ株式会社
Dアカデミー株式会社