エアロボクラウド・スタティック解析機能の検証
エアロボクラウド、Rinexデータ形式に対応しました。
エアロセンス株式会社(https://aerosense.co.jp) がエアロボクラウドで提供している基準点測量機能が強化されました。 この強化によりRinexデータ形式での入力が可能となり、Hi-Target社のGNSS受信機を利用したスタティック測量において、 基準点測量をより簡単に行うことができます。
- データをアップロードするだけで、網平均計算まで全ての処理をクラウドで実行します
- 電子基準点を自動で検索して計算に利用します。現場基準点を既知点にして測量することも可能です
- 計算後、手簿・記簿・成果簿などの帳票も自動出力が可能です
- 日本測量協会、電算プログラム検定証明取得済み
今回、以下の機能が強化されました。
1. Rinexデータの入力が可能に
2周波受信機のデータを用いることで、電子基準点を既知点とした基準点測量を行うことができます。
所有の受信機やエアロボマーカーなどを組み合わせて、多くの点を計測することが可能になります。
2. 短縮スタティックに対応可能
3,4級基準点測量で基線長が短い場合は、短縮スタティック測位が適用できます。
エアロボクラウドは短縮スタティックにも対応していますので、観測時間を20分に短縮することが可能です。
当社では、エアロセンス社と協力して検証作業を進めてまいりました。本ページにて、検証結果を報告します。
なお、検証に使用したGNSS受信機は、Hi-Target社 V100 および V90plus です。
エアロボクラウドの詳細については、エアロボクラウド製品ページをご覧ください。
入力~計算の流れ
1. 観測データの入力
観測したデータ(Rinex形式)とPCV補正データをアップロードします。

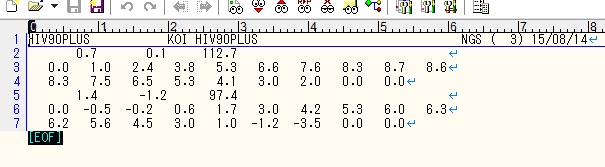
PCV補正データは、アンテナ別のテキスト形式となります。以下は、Hi-Target社V90plusの例です。
入力した観測データの概略位置を、マップ上で確認できます。

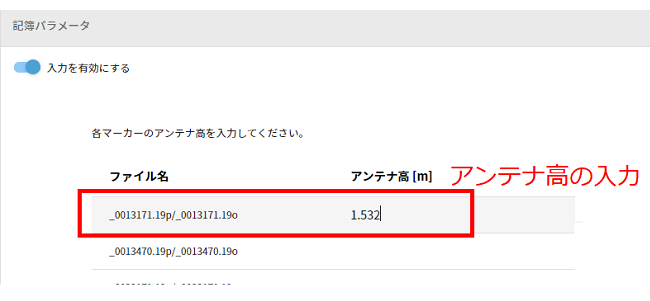
2. 計算パラメータの入力
計算に必要な各パラメータを入力します。
PCV補正データは、観測点毎に使用したアンテナに対応するPCVデータを、インポートしておいたデータから
選択することによって行います。

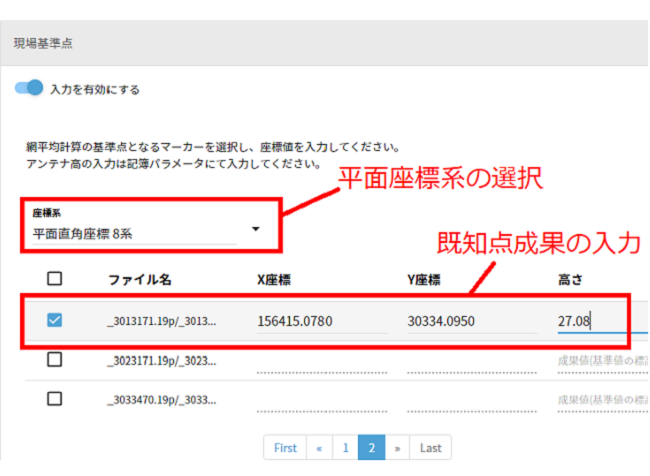
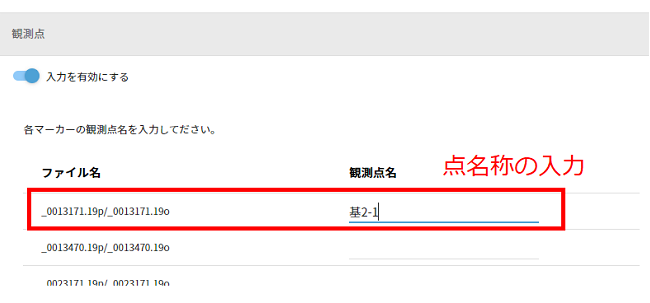
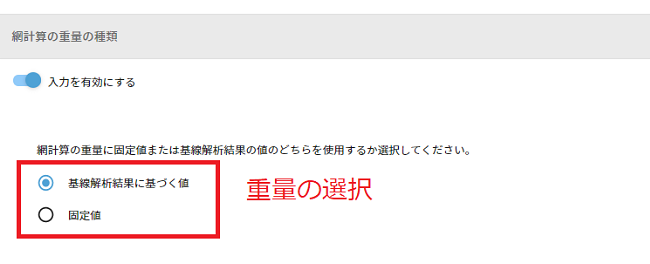
既知点の成果座標、点名称、アンテナ高および重量を順次入力していきます。 (電子基準点を既知点にする場合は、現場基準点の入力は不要です)
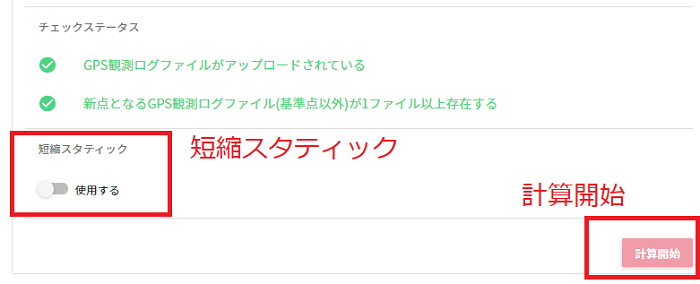
3. 計算および再計算
全ての入力が完了したら、「計算開始」をクリックします。短縮スタティックの場合は、設定スイッチを有効に切り替えておきます。 クラウド上で計算が完了したら、メールで連絡が来ます。
計算終了後、網を確認します。網は自動的に生成されていますので、不要な基線がある場合は、削除して再計算することが可能です。

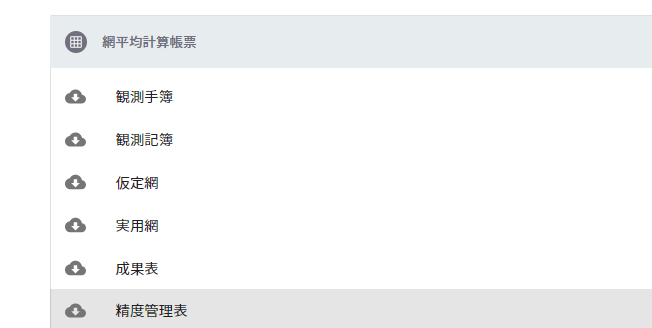
4. 帳票のダウンロード
計算の完了後、手簿記簿および網平均結果などをダウンロードできます。
他ソフトウェアとの計算結果比較
RTKLIBをベースに国土地理院が開発した基線解析ソフトウェア
「GSILIB」
および、Mr.Boo氏の網平均ソフトウェア
「Spacenet」
(プログラム検定済)の組み合わせで計算した結果と、エアロボクラウドの計算結果を比較します。
検証に用いたのは、長岡市前川地区の基準点(基2-2、基3-10、基3-11)の三点で、以下の2パターンで計算した結果を比較します。
- 周辺の四等三角点を既知点として計算
- 電子基準点を既知点として計算(セミダイナミック補正含む)
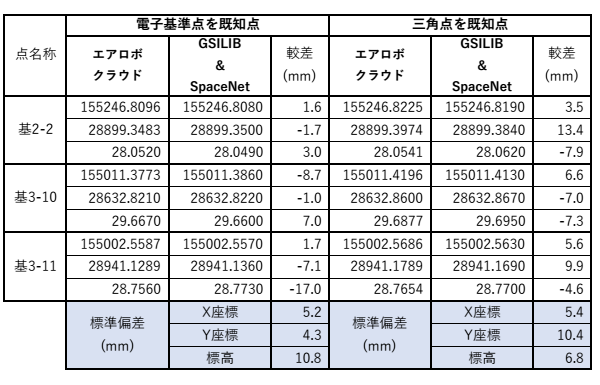
ソフトウェア間の較差はおおむね10mmに収まっています。
既存の基準点を新点として測量した検証結果
1. 基線解析結果
エアロボクラウドの網平均計算部分は、測量協会のプログラム検定の確認済みです。基線解析部分について、国土地理院の比較基線場で
観測したデータを用いて検証してみました。
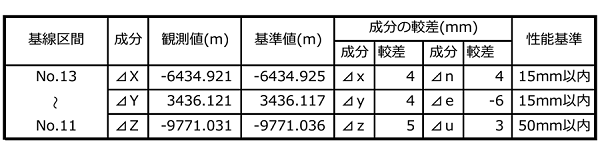
下表は、比較基線場「国松No13」~「構内No.11」間の基線解析結果です。一級GNSS測量機の性能基準に収まる結果を得ています。
2. 基準点を利用した検証
下図の通り、長岡市前川地区の基準点を利用して検証を行いました。検証する基準点は(基2-2、基3-10、基3-11)の三点で、
- 周辺の基準点(基3-2、基3-12、基3-15)を既知点
- 電子基準点を既知点(セミダイナミック補正含む)
- VRSで単点測位(10エポック平均)
の3パターンで行いました。

成果座標との較差は以下の通りです。
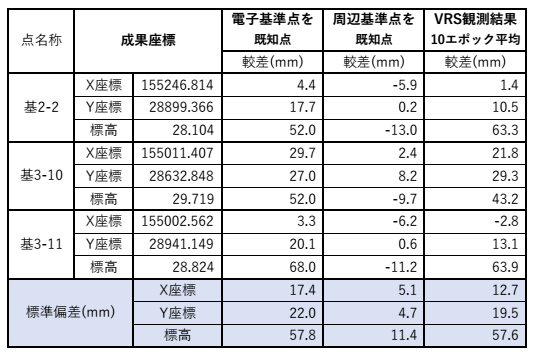
周辺基準点を既知点とした計算では、較差はおおむね10mm前後に収まっています。電子基準点を既知点とした計算およびVRSでは較差が大きくなっており、
特に高さ方向の較差が大きくなっています。
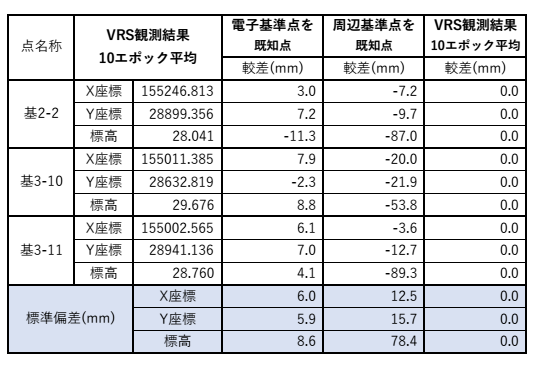
検証に用いた前川地区の基準点は2012年の測量成果です。成果表のジオイド高を確認すると、「日本のジオイド2010」となっており、
標高改算が行われていません。現行のジオイド「日本のジオイド2011ver2」とは、この付近で約90mmの差があります。
VRS単点測位結果を正として比較すると、当然電子基準点を既知点とした計算結果の方が較差が小さくなります。
以上の結果より:
- 現場基準点に整合させたい場合は、現場基準点を既知点とした基準点測量
- 周辺に適当な基準点がない場合、もしくはVRSと整合させたい場合は電子基準点を既知点とした基準点測量
といった使い分けが適当といえます。
現場基準点を既知点とする場合は、基準点がどのように測量されたかに注意する必要があります。
上記検証の通り、測量時期によっては、電子基準点を基にした(VRS等のネッとワークRTKも含む)測量結果と差が出る
恐れがあるためです。
こうした違いは、基となる基準の違いから生じる誤差です。どちらも正しい結果といえるでしょう。
このような違いが発生する可能性を理解したうえで、現場基準点を利用する必要があります。
* 現場基準点を既知点とした現場でVRSを使用する場合、座標換算によって現場基準点に整合させた観測を
行うことができます。こちらのページをご覧下さい。
最適なGNSS受信機を使用する

エアロボクラウドは、今回の機能強化により2周波対応となりました。これにより、電子基準点を既知点とした基準点測量を
行うことができ、受信機1台であっても一級基準点を落とすことが可能となりました。
ネットワークRTK用にHi-Target社GNSS受信機を所有している場合、
有効に活用することができます。

現場基準点を使用する場合、複数台の受信機を設置する必要がありますが、エアロボマーカのようなコストパフォーマンスに
優れた受信機を多数用意すれば工数を削減することができます。
エアロボマーカ―
は、地理院登録機種(2級GNSS測量機)の1周波受信機です。基線長10km未満のスタティック測量に
使用できます。